Hang Su
Ph.D. Student @ ShanghaiTech | Visiting Student @ UPenn GRASP Lab

My name is Hang Su (苏杭). I am a PhD student at ShanghaiTech University and a member of the Mobile Perception Lab, advised by Prof. Laurent Kneip. I received my B.Eng. in Computer Science from ShanghaiTech University in 2021. I am currently a visiting student at the GRASP Lab, University of Pennsylvania, working with Prof. Kostas Daniilidis.
My research interests lie in 3D Computer Vision and Robotics — building systems that perceive geometry and motion in the real world. I am drawn to Structure-from-Motion and the broader question of how machines recover spatial understanding from raw visual data, combining geometric modeling with learning-based methods.
My current work focuses on event cameras — neuromorphic sensors that capture brightness changes asynchronously at microsecond resolution. They hold great promise for robotic perception under fast motion and challenging lighting — one of many promising directions in 3D vision and robotics.
Selected Publications
- ECCVMatch-Any-Events: Zero-Shot Motion-Robust Feature Matching Across Wide Baselines for Event CamerasIn Proceedings of the European Conference on Computer Vision (ECCV), 2026
- ICCV
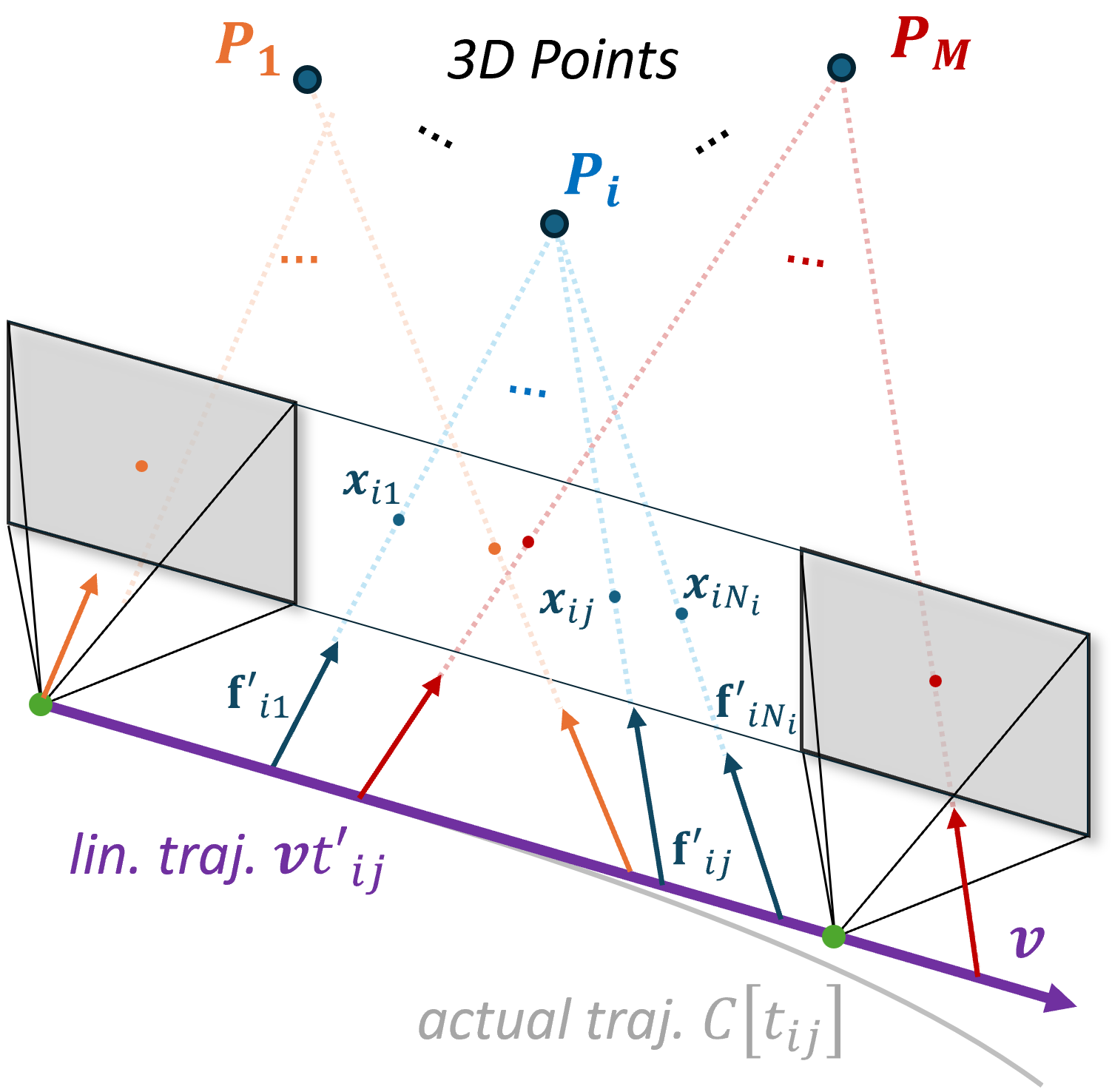 A Linear N-Point Solver for Structure and Motion from Asynchronous TracksIn Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025 | Highlight (top 9.7%)
A Linear N-Point Solver for Structure and Motion from Asynchronous TracksIn Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025 | Highlight (top 9.7%) - RA-L
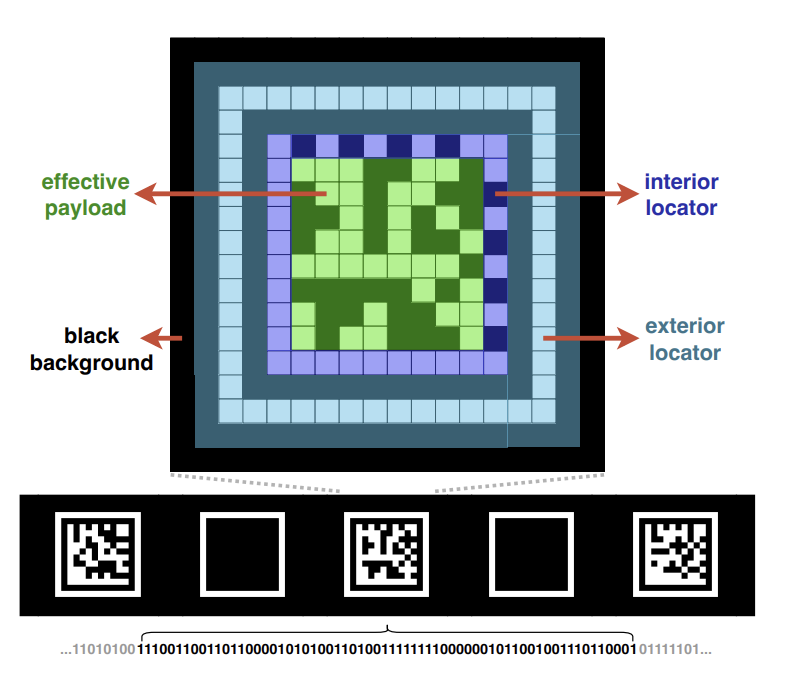 Motion-Aware Optical Camera Communication with Event CamerasIEEE Robotics and Automation Letters, 2024Presented at ICRA 2025
Motion-Aware Optical Camera Communication with Event CamerasIEEE Robotics and Automation Letters, 2024Presented at ICRA 2025 - CVPR
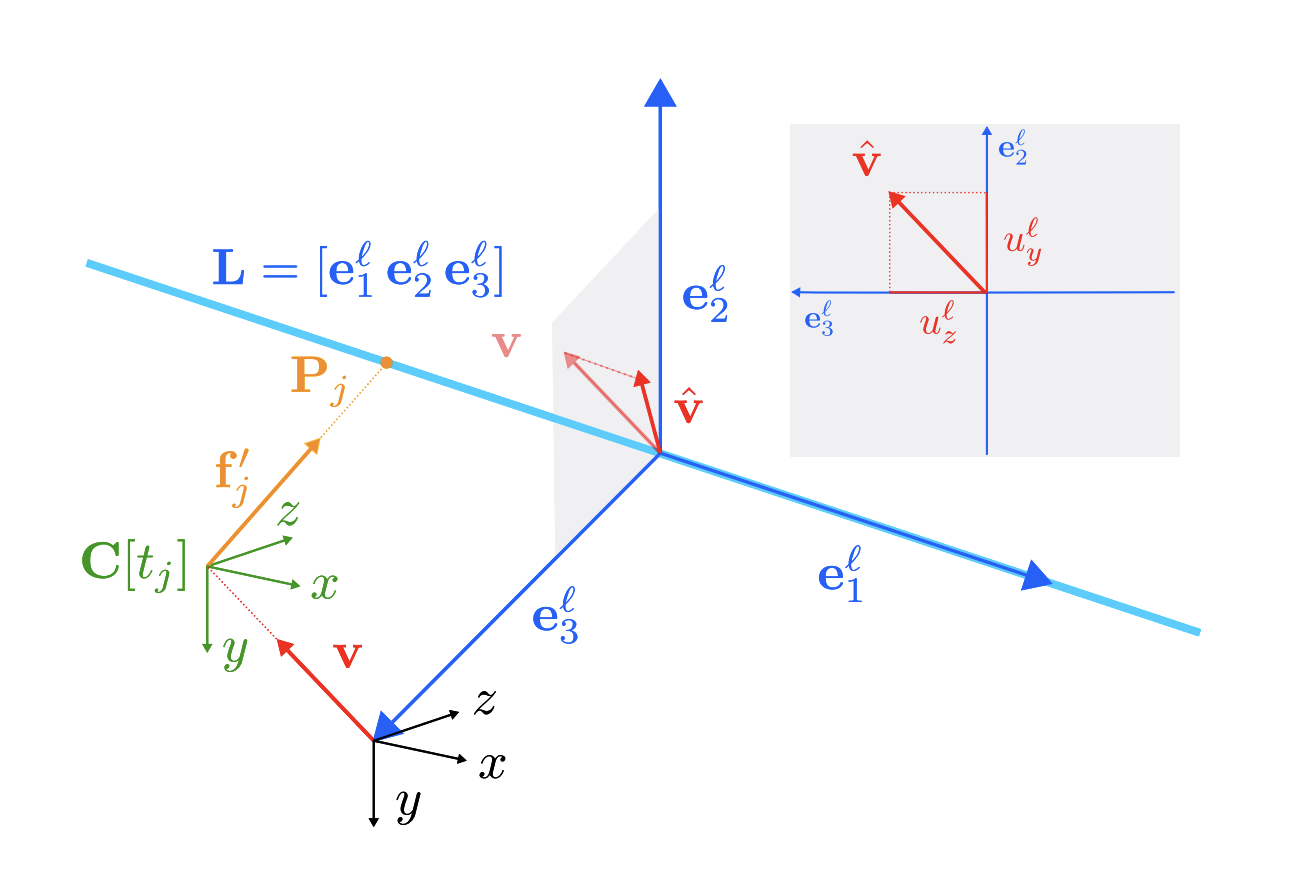 An N-Point Linear Solver for Line and Motion Estimation with Event CamerasIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 | Oral (top 3.3%)
An N-Point Linear Solver for Line and Motion Estimation with Event CamerasIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 | Oral (top 3.3%) - ICCV
 A 5-Point Minimal Solver for Event Camera Relative Motion EstimationIn Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2023 | Oral (top 9%)
A 5-Point Minimal Solver for Event Camera Relative Motion EstimationIn Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2023 | Oral (top 9%)